 Pod tímto titulem Werth Messtechnik GmbH presentuje nový model multisenzorového souřadnicového měřicího stroje Werth TomoScope® 500 HV s rentgenovým senzorem pro počítačovou tomografii. Počítačová tomografie (Computed Tomography = CT) je radiologická vyšetřovací metoda, která pomocí rentgenového záření umožňuje zobrazení vnitřností těl živočichů, především člověka. Metoda se využívá dlouhodobě v oblasti medicíny a nově i v oblasti dimenzionální inspekce průmyslových dílců. Hlavní oblast využití je v komplexním a přesném měření dílců i v místech, kam ostatní senzory nemají přístup.
Pod tímto titulem Werth Messtechnik GmbH presentuje nový model multisenzorového souřadnicového měřicího stroje Werth TomoScope® 500 HV s rentgenovým senzorem pro počítačovou tomografii. Počítačová tomografie (Computed Tomography = CT) je radiologická vyšetřovací metoda, která pomocí rentgenového záření umožňuje zobrazení vnitřností těl živočichů, především člověka. Metoda se využívá dlouhodobě v oblasti medicíny a nově i v oblasti dimenzionální inspekce průmyslových dílců. Hlavní oblast využití je v komplexním a přesném měření dílců i v místech, kam ostatní senzory nemají přístup.
Werth TomoScope® 500 HV
Přesnost udávaná dle norem VDI/VDE 2617 resp. ISO 10360
Technické parametry:
Měřicí rozsah: Lmax = 500 mm, Dmax = 350 mm
Kompaktní rentgenový detektor o velikosti 400 × 400 mm
Rozlišení detektoru: 2 048 × 2 048 pixelů
Velikost pixelu: 200 µm
Rentgenový zdroj: 225 kV
Max. povolená chyba:
E1: (2,5 + L/120) µm
E2: (2,9 + L/100) µm
E3: (4,5 + L/75) µm
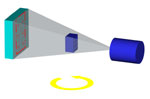
Pracovní princip a metodu měření si pokusíme vysvětlit na konkrétním příkladu. Bude se jednat o plastový dílec pro automobilový průmysl o délce 250 mm a průměru 180 mm s tolerancemi 0,1 mm. Samotný dílec se vloží na rotační osu, která je umístěna mezi rentgenový zářič a detektor. Jestliže dílec leží v kuželu rentgenových paprsků a jeho profil dopadá na detektor, je možné se k dílci rentgenovým zářičem přiblížit a tak dopadající profil na matnici zvětšit a obráceně. Tento efekt je podobný jako při hře s baterkou, kdy velikost stínu ruky na stěně se zvětší či zmenší se vzdáleností baterky od ruky. Jelikož náš dílec je menší než velikost detektoru, je možné se k němu přiblížit tak, abychom vyplnili měřicí oblast detektoru 400 × 400 mm a tak fakticky provedli dvojnásobné zvětšení. Tím se prakticky zmenší velikost detekovaného bodu (pixelu detektoru) na polovinu, čímž se zvýší rozlišení a současně i přesnost.
Podle síly stěn a vlastností materiálu se nastaví intenzita zářiče na odpovídající hodnotu a je možné začít proces skenování. Jak už jsem se zmínil, je zprvu zobrazen pouze 2D profil, ale díky otáčejícímu se dílci jsou tyto profily zachytávány po celou dobu otáčení. Tedy pokud otočíme dílcem o 360°, lze z nasnímaných profilů zrekonstruovat 3D objemový obraz kompletního dílce. Tento obraz je zatím tvořen voxely, což jsou kostičky o velikosti odpovídající rozlišení, se kterým jsme dílec skenovali. Nyní můžeme dílcem virtuálně procházet či jej zkoumat, jelikož máme k dispozici 3D digitální obraz kontrolované součásti a tak lze odhalit případné skryté vady. Této metodě vykreslení objemové grafiky říkáme volume rendering. Volume rendering neboli vykreslení objemu, či obecně nazývaná objemová grafika, je speciálním oddílem 3D počítačové grafiky, zajišťující samotné znázornění a vizualizaci objektů reprezentujících vzorkovaná data ve třech či více dimenzích. Třídimenzionální pole voxelů je datovým souborem objemových voxelů. Název voxel charakterizuje objemový prvek, což je zevšeobecnění představy o pixelu, který znamená obrazový prvek.
Pro rozměrovou inspekci však je nutné z této objemové grafiky získat polygonizovanou síť bodů s informacemi o jejich koordinátách. Tedy každý jednotlivý voxel přeměníme v bod, který si s sebou nese informaci o svých souřadnicích XYZ. Sousední 3 body se spojí přímkami, čímž nám vzniknou trojúhelníkové plochy popisující povrchy celé součásti. Takto získaná polygonální síť bodů je tedy připravena pro kontrolu dle výkresové dokumentace. Jakmile taková plocha vznikne, je prakticky k dispozici CAD nominální model, jenž je možné využít pro reverzní inženýrství či rozměrovou kontrolu, jak vidíme na obrázku. Zní to velmi jednoduše, ale tomu všemu předchází velké množství procesů a složitých matematických výpočtů a korekcí.
www.prima-bilavcik.cz