 Robot je jediný světový název automatického zařízení schopného reagovat na podněty okolí a na toto okolí zpětně působit. Má kořeny v bývalém Československu. První oficiální použití slova "robot" se objevilo v dramatu českého autora Karla Čapka z roku 1920 pod názvem R.U.R. Tuto drama napsal K. Čapek na Slovensku v Trenčianských Teplicích, kde byl jeho otec lázeňským lékařem. Robot byl v tomto dramatu zobrazen jako technická hrozba. (Zdroj).
Robot je jediný světový název automatického zařízení schopného reagovat na podněty okolí a na toto okolí zpětně působit. Má kořeny v bývalém Československu. První oficiální použití slova "robot" se objevilo v dramatu českého autora Karla Čapka z roku 1920 pod názvem R.U.R. Tuto drama napsal K. Čapek na Slovensku v Trenčianských Teplicích, kde byl jeho otec lázeňským lékařem. Robot byl v tomto dramatu zobrazen jako technická hrozba. (Zdroj).
Roboty v reálném průmyslu hrozbu eliminují, nahrazují dělníky v náročné práci. První nosnosti robotů byly stanoveny podle maximálních nosností dělníků, mužů a žen. Proto se firmy při sestrojování robotů koncentrovaly na první maximální nosnost robotů v rozmezí 15-20 kg. Zmíněné roboty se stáli nejrozšířenějšími a současně se koncipovali jako univerzální pro velký rozsah aplikací, od velmi přesných po méně přesné, od pomalých operaci až po dynamické aplikace.
Koncept univerzálního robota se šesti stupni volnosti vytvořil základ pro masovou výrobu robotů a jejich postupné snižování nákladů i zvyšování dostupnosti. Velký rozsah aplikačního využití byl cílem pro každého výrobce 6 vosích robotů. Byly integrovány do širokého spektra aplikací, od přesných svařovacích a montážních procesů, kde je klíčovým cílem zachování přesnosti, až po nepřesné, ale dynamické manipulační aplikace, jako jsou např. automatizace v přesunu produktů v CNC stroji, zacílená na maximální redukci mezioperačního času.
Tyto trendy byly důvodem investování prvních vývojových aktivit společnosti SPINEA® do reduktorů, které splňovaly požadavky vysoké přesnosti a funkčnosti právě pro takový typ robota. V roce 1997, kdy společnost potvrdila funkčnost a spolehlivost nového konceptu vysoko-přesných převodovek, byly osloveny robotické společnosti v Evropě, kde byl také potvrzen zájem o testování v rámci nových vývojových trendů v robotice. Objevila se první výrazná šance integrace reduktorů do robota s maximální univerzálností, s nosností 16 kg - KR 16 obchodní značky světového jména KUKA®. Tato šance mobilizovala inženýrů obou společností a jejich vzájemnou kooperací se dosáhlo úspěšný test celého robota s výbornými výsledky. Po roce 2000 se spolupráce rozvinula do dalších implementaci vysoce-přesných převodovek do robotech Evropských i Asijských značek. Avšak v žádné z nich nebylo dosaženo tak výrazný komerční úspěch společnosti SPINEA® jako v aplikaci prvního robota KR 16. Od roku 2000 do současnosti bylo prodáno více než 70 000 kusů reduktorů do tohoto typu robota včetně jeho modifikaci.
 Dlouhodobé dodávky produktu během mnoha let vytvořily vzájemnou důvěru a schopnost společnosti SPINEA® připravovat produkty pro další typy a generace robotů světového giganta společnost KUKA®.
Dlouhodobé dodávky produktu během mnoha let vytvořily vzájemnou důvěru a schopnost společnosti SPINEA® připravovat produkty pro další typy a generace robotů světového giganta společnost KUKA®.
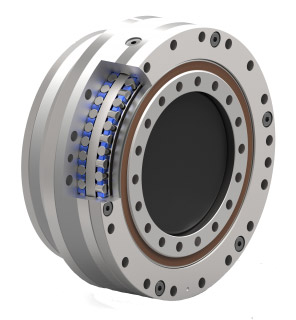
Poslední G-série vysoko-přesných převodovek TwinSpin® společnosti SPINEA® byla vyvinuta a integrována do nejnovějších typů robotů při společném vývoji reduktoru a robota. Tato nová konstrukce reduktorů byla navržena tak, aby se v konceptu minimalizovaly závislé toleranční řetězce komponent a tím se dosáhla vysoká tuhost a přesnost celku. Reduktor TwinSpin® G-série tak jako u předchozích sériích nemá pružné elementy a převod se realizuje výlučně přes valivé elementy. Valivé elementy zejména v této sérii je možné volit tak, aby se pro tytéž reduktory dosáhla výrazná variabilita technických parametrů přesnosti a účinnosti.
Tímto konceptem je možné sestrojit reduktory, které jsou sice méně přesné, ale dosahují vysokou hodnotu parametru účinnosti a tření. Dáno reduktory jsou ideální pro dynamické aplikace robotů v segmentech pro manipulační operace vyšších rychlostí. Současně je možné sestrojit reduktory se stejnými vnějšími rozměry, které jsou s vyššími třecími parametry, ale s extrémní přesností. Tyto jsou ideální pro velmi přesné aplikace robotů, v segmentech pro technologie, které tuto preciznost vyžadují. Jako reálný příklad můžeme uvést laserové svařování, finální obrábění nebo montážní operace ve vysokých tolerancích.
Tímto jednotným konceptem reduktorů, ale s rozdílnými technickými parametry, je možné vyrábět stejné roboty, ale s různými technickými parametry. Výrobci robotů mohou užší specializovat na konkrétní aplikaci klienta a uspokojit ho v maximální možné míře ve dvou úrovních přesnosti:
Při méně přesných aplikacích s redukcí třecích parametrů je možné dosáhnout snížení spotřeby energie v servomotorů a snížení provozních nákladů.
Při aplikaci přesných reduktorů lze použít robot pro extrémně přesné pohyby během dlouhé životnosti, tím prodloužit používání celé technologie v robotické buňce a zvýšit ziskovost aplikace.
Roboty pro oba zmíněné směry mohou mít stejnou konstrukci, se stejnými vnějšími rozměry a stejným řídicím systémem. Úpravou reduktorů dosahují výraznější parametry beze změny nákladů na robot. Tímto konceptem se rozšíří použití robota i do oblastí, které univerzálně koncepty robotů nebyly schopny efektivně realizovat. Do oblastí vysokých přesností a do oblasti vysoké účinnosti.
Společnost SPINEA® je otevřena spolupráci na vývoji nových robotů. Dlouholetá spolupráce s robotickými firmami trvající více než 2 desetiletí je ideálních základem nových účinnějších robotických aplikaci v budoucnosti, které vyžaduje robotizace a automatizace světového průmyslu 4.0.